|
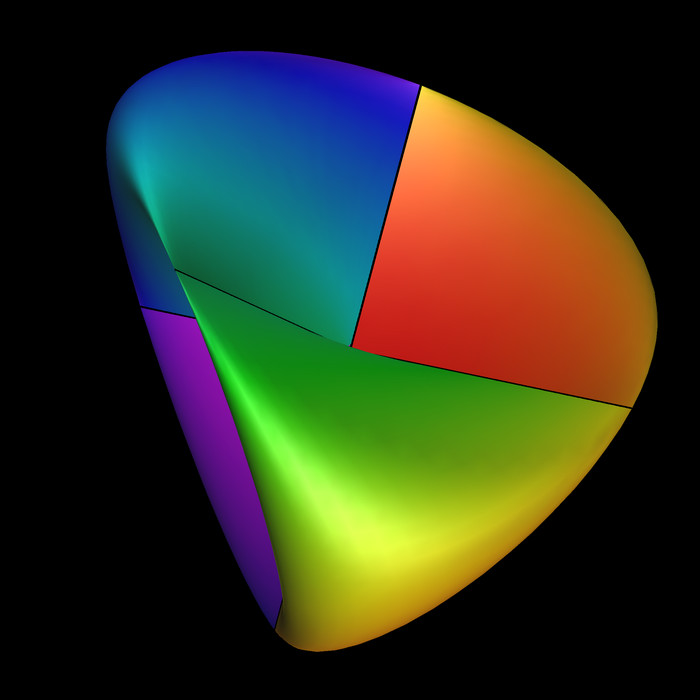
Steiner's Roman SurfaceThe real projective plane can be embedded in six-space in a highly symmetric form; this, in turn, can be projected into four-space, again as an embedding. This is known as the Veronese surface. Projections of the Veronese surface into three-space necessarily have local self-intersection known as pinch points. One such projection is the cross-cap, and another is Steiner's Roman surface shown here. This projection has six pinch points connected by three segments of self-intersection which cross at a triple point at the center. The symmetry group for the Steiner surface is a subgroup of the octahedral group. This image appears on the poster Computer Graphics in Mathematical Research for the ICMS meetings in Beijing.
|
|
|
![[Link]](../../../buttons/next.gif)